Highlighted Research
Full list available on Google Scholar.
*Equal Contribution
-
-
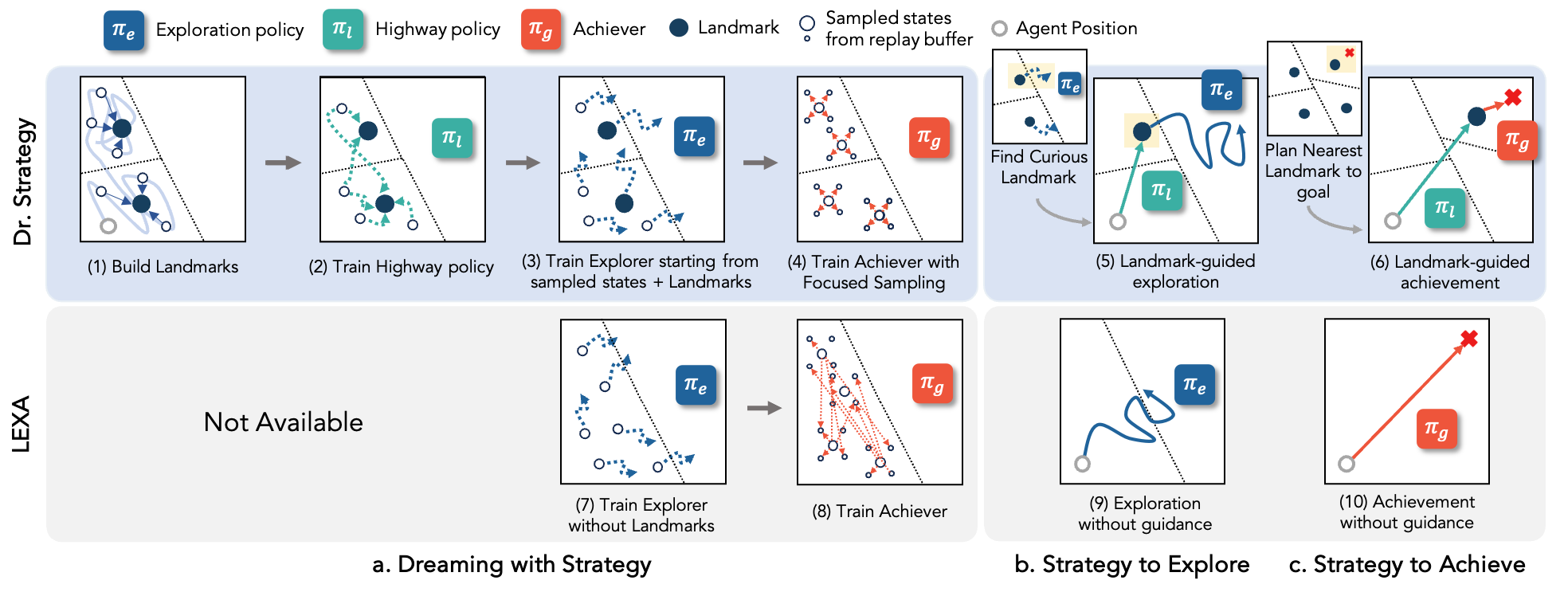
Dr. Strategy: Model-Based Generalist Agents with Strategic Dreaming
Hany Hamed*, Subin Kim*, Dongyeong Kim, Jaesik Yoon, Sungjin Ahn.
ICML
Research Experience
-

Artificial and Mechanical Intelligence Lab, IIT Genoa, Italy
— Present- Developing torque-control humanoid locomotion policies using reinforcement learning..
- Designing and implementing RL experiments for ErgoCub with IsaacLab.
- Building a Sim-to-Real transfer framework to enable robust humanoid locomotion.
-

University of Alberta & Amii (Remote)
— Present- Assisted in research on mask-based goal representation for robot learning, conducting experiments with multiple open-vocabulary object detection models to assess their effectiveness.
- Investigated model-based (TD-MPC2) and model-free (SAC) reinforcement learning for Sim-to-Sim transfer with finetuning in the target domain.
-

Machine Learning & Mind Lab, KAIST, Daejeon, South Korea
—- Researched zero-shot task generalization in model-based RL, leading to a state-of-the-art agent.
- Explored intrinsic motivation in hierarchical model-based RL, focusing on how high-level policies guide low-level policies.
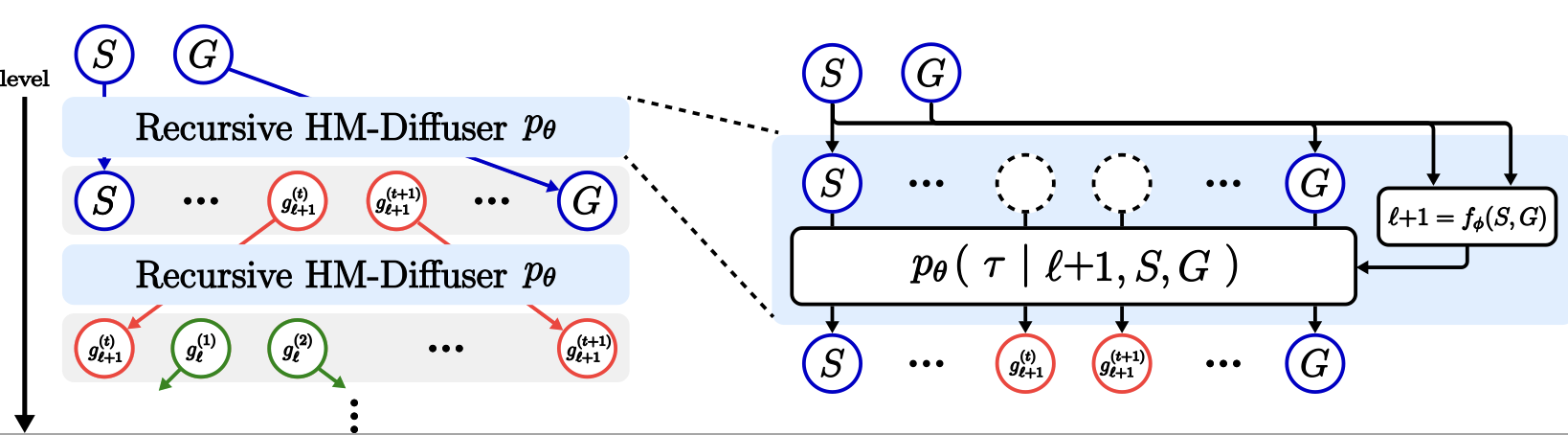
- Worked on diffusion-based planning for long-horizon tasks while learning on short trajectories.
-

Unmanned Technology Laboratory, Innopolis University, Russia
—- Developed ROS packages for drone modules including gimbal control, RTK GPS, and payload control.
- Integrated Livox lidar with lab’s drone for outdoor mapping.
- Developed a handheld Lidar device for indoor/outdoor mapping for an industrial partner.
-
Center of Robotics, Innopolis University, Russia
—- Conducted RL experiments for a stabilizing control policy of a tensegrity hopper.
- Designed and implemented a contactless differentiable physics simulator for tensegrity robots using Taichi.
- Performed research on sim2real transfer for a three-prism tensegrity robot.
Education
-
School of Computing, KAIST
Computer Science, Innopolis University
–Service
Reviewer
- Conferences: ICLR 2024, 2025, IROS 2024, ACML 2024, Humanoids 2025, AAAI 2026
- Workshops: ICML AutoRL 2024
- Journals: IEEE RA-L 2024
Teaching Assistant
-
CS492: Deep Reinforcement Learning
-
Introduction to ROS
Awards
- 2024 – ICML Travel Grant
- 2022–2024 – KAIST Graduate School Full Scholarship (Master)
- Fall 2020 – Outstanding Achievements, Innopolis University
- 2020, 2021 – Outstanding Contribution to Science, Innopolis University
- June 2021 – 3rd Place, DOTS Competition (Bristol Robotics Lab & Toshiba)
- 2018–2022 – Innopolis University Full Scholarship (Bachelor)